原作者:liuyu-419812
参考:http://wiki.ros.org/rosserial_arduino/Tutorials/Blink
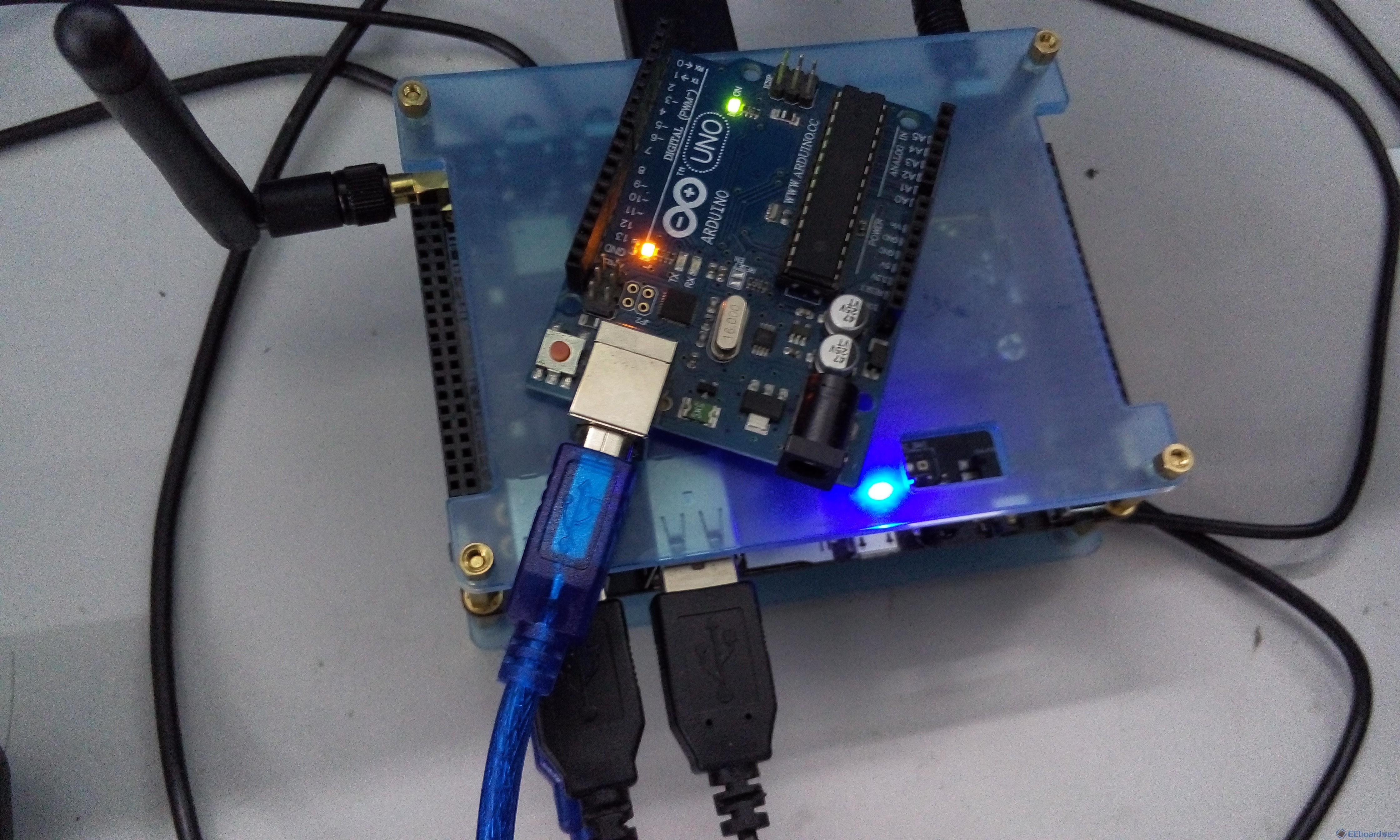
我们在之前的教程中已经创建了一个ROS发布者,在这里我们将创建一个订阅者,在Arduino每次收到消息的时候闪烁LED。通过在Arduino examples菜单选择ros_lib->Blink,你会打开下面的代码:
- /*
- * rosserial Subscriber Example
- * Blinks an LED on callback
- */
- #include <ros.h>
- #include <std_msgs/Empty.h>
- ros::NodeHandle nh;
- void messageCb( const std_msgs::Empty& toggle_msg){
- digitalWrite(13, HIGH-digitalRead(13)); // blink the led
- }
- ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );
- void setup()
- {
- pinMode(13, OUTPUT);
- nh.initNode();
- nh.subscribe(sub);
- }
- void loop()
- {
- nh.spinOnce();
- delay(1);
- }
现在,我们来分析下面的代码。- #include <ros.h>
- #include <std_msgs/Empty.h>
如之前一样,我们需要在任何ROS Arduino程序里包含ros.h。我们也需要为消息包含头文件,在这个例子下,为Empty消息。
接着,我们需要实例化一个节点句柄,允许我们的程序创建发布者和订阅者。节点句柄需要串口通信。
- void messageCb( const std_msgs::Empty& toggle_msg){
- digitalWrite(13,HIGH-digitalRead(13));
- }
然后,我们为订阅者创建回掉函数。这个回掉函数必须将一个消息的常量引用作为它的参数。在我们的回掉函数中,消息类型是std_msgs::Empty,消息名是toggle_msg。在我们的回掉函数内部,我们可以引用toggle_msg,但是因为它是空的,所以不需要这么做。我们只是在Arduino每次收到消息的时候闪烁LED。- ros::Subscriber<std_msgs::Empty> sub(“toggle_led”,&messageCb);
- void setup()
- {
- pinMode(13,OUTPUT);
- nh.initNode();
- nh.subscribe(sub);
- }
在Arduino setup函数,你需要初始化你的ROS节点句柄,广播将要发布的主题,订阅想监听的主题。- void loop()
- {
- nh.spinOnce();
- delay(1);
- }
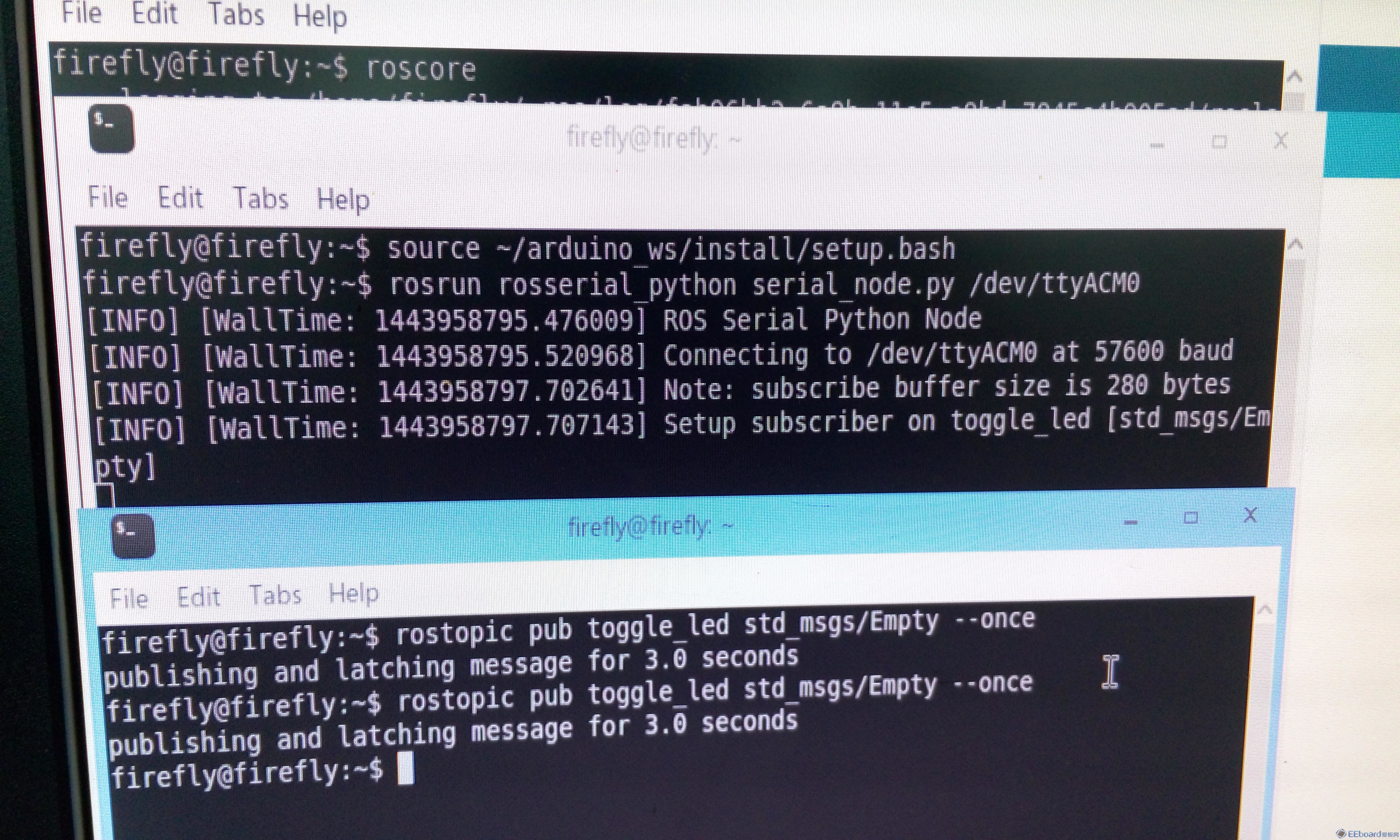
最后,在loop函数里,我们调用ros::spinOnce()函数,处理所有的ROS通信回掉函数。在loop()函数里,我们不需要其他额外的处理,因为,ros::spinOnce()会将传递的消息传到订阅者回掉函数。 分析完代码,下面需要编译上传。接着,在新的终端窗口,启动roscore:
然后,运行rosserial客户端应用程序, 其中<ws>为你安装rosserial的工作空间,确保使用正确的串口:- source ~/<ws>/install/setup.bash
- rosrun rosserial_python serial_node.py /dev/ttyACM0
最后,你可以使用rostopic转换你的LEd状态。
- rostopic pub toggle_std std_msgs/Empty --once
转自爱板网:http://www.eeboard.com/bbs/thread-44537-1-1.html
| 





