- sudo apt-get install ros-jade-rosserial-arduino
- sudo apt-get install ros-jade-rosserial
可以把jade替换为你安装的版本:如indigo。
尝试了上面的指令,没有成功,可能和ROS是编译安装的有关吧,也不是很确定。只能通过源码编译安装。
在下面的指令中,<ws>代表你的catkin工作空间。复制代码
- cd <ws>/src
- git clone https://github.com/ros-drivers/rosserial.git
- cd <ws>
- catkin_make
- catkin_make install
- source <ws>/install/setup.bash
注意:当前需要运行catkin_make install,否则ros_lib目录下的部分内容会丢失。
在使用rosserial包时,每打开一个终端需要运行一次source <ws>/install/setup.bash。 2.在Arduino环境下安装ros_lib
前面的安装步骤创建了ros_lib,必须拷贝到Arduino编译环境中,以使能Arduino程序与ROS的交互。在下面的步骤中,<sketchbook>是Arduino环境存放ketch的目录。通常为sketchbook,在home目录下。
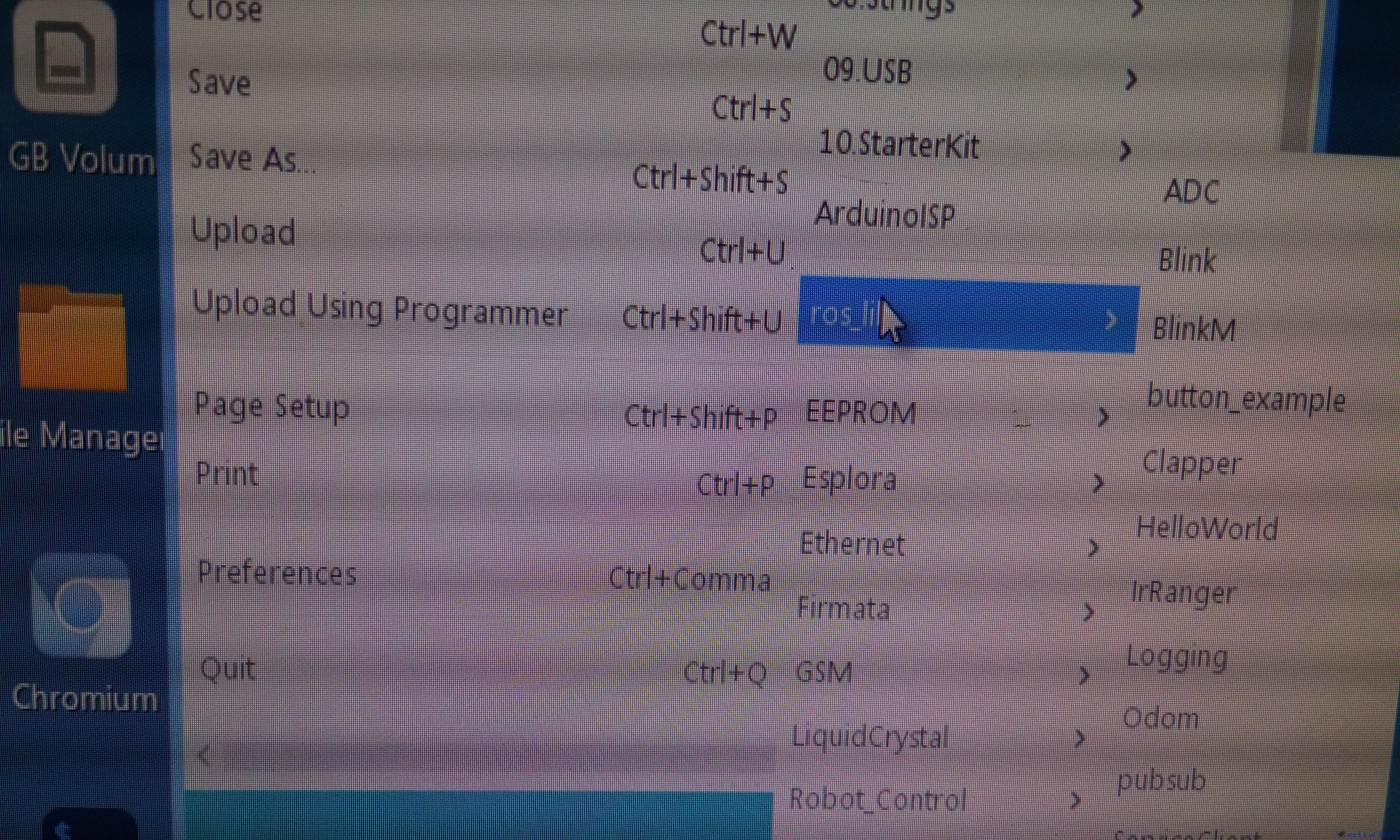
注意:为了重新生成,需要删除libraries/ros_lib,因为它的存在会引起一个错误。复制代码 在重启IDE后,在examples下看到ros_lib,完成安装。
- cd <sketchbook>/libraries
- rm -rf ros_lib
- rosrun rosserial_arduino make_libraries.py ~/<sketchbook>/libraries